USD $ 29800
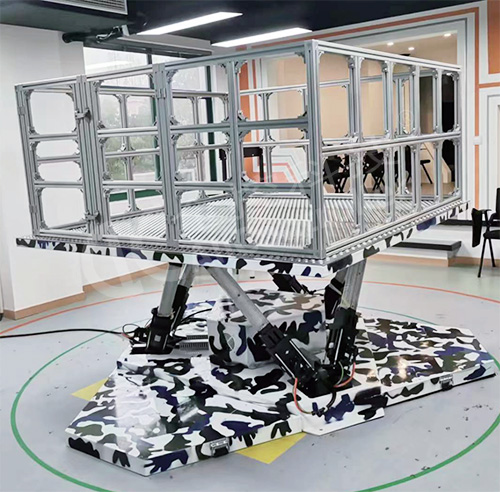
The 6dof motion platform of the double-layer 6dof stabilization platform of the lower platform simulates the wave data of the ship, and the upper platform is leveled in real time through the inertial guidance system to ensure that the upper platform surface always remains horizontal.
The 6dof stab platform realizes the stabilization of the motion carrier equipment to ensure the accurate tracking of the target, which is widely used in the military fields such as machinery, shipboard, vehicle-mounted weapons, etc. and in the fields of space remote sensing and detection, public security and fire prevention, and environmental monitoring. Such as in ships, warships on the radar antenna, stabilization platform to maintain inertia level to ensure that the radar to find the detection object.
When the lower platform of TecPlat simulates the movement of objects such as ships or vehicles, the upper plane of the upper platform is required to be kept horizontal. Since the upper and lower platforms are rigidly connected, the attitude gyroscope can be installed in the upper plane (A plane) or lower plane (B/C plane) of the upper platform (or both, if required by some algorithms).
The large angle tilt is a superposition of the same attitudes of the two platforms (the opposite of self-balancing, where the attitudes of the upper and lower platforms cancel each other out) to achieve a larger angle or displacement.
☑Game Simulator
☑Industrial Testing
☑Teaching and training
☑Medical equipment
☑Experimental research
☑Software testing
☑Satellite test platform
☑Flight Simulator
☑Film shooting
☑Sea motion compensation
☑Earthquake simulation
☑Drone landing
☑All kinds of simulated driving
☑Other fields...
| Features | Excursion | Velocity | Acceleration |
|---|---|---|---|
| Roll | ±16° | 30°/s | 100°/s² |
| Pitch | ±15° | 30°/s | 100°/s² |
| Twist | 0-18° | 30°/s | 100°/s² |
| Surge | 180mm | 400mm/s | 4m/s² |
| Sway | 170mm | 400mm/s | 4m/s² |
| Heave | 200mm | 400mm/s | 4m/s² |

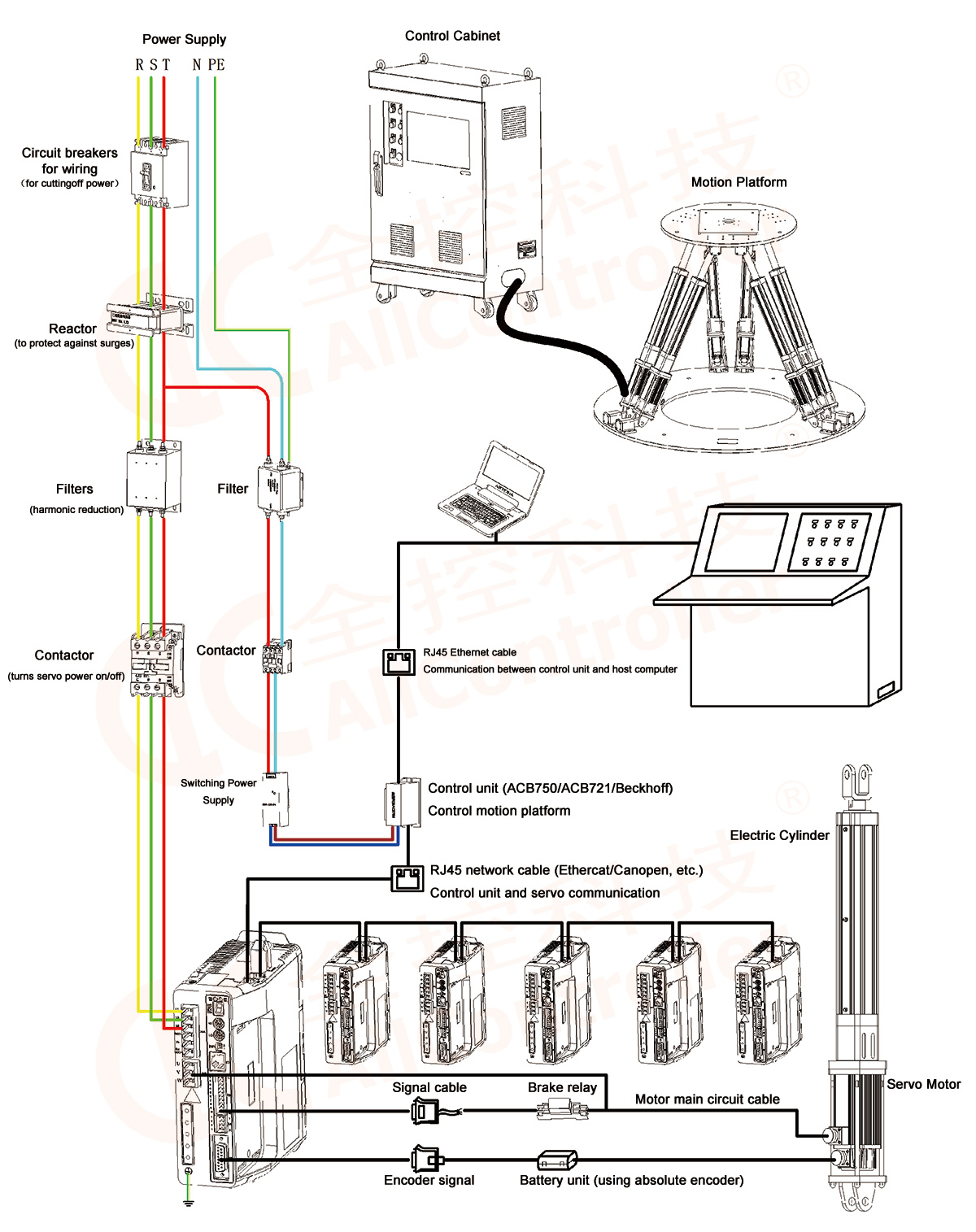
Allcontroller Control Motion Platform Schematic
We always insist on providing you with high-quality and reliable motion systems.
Our customized six-degree-of-freedom motion system includes: mechanical analysis, kinematic analysis, dynamic analysis, modal analysis, finite element analysis, control simulation and accuracy compensation, etc. It is completely built into the control software and supports multiple communication interfaces. Customers can access their own developed control software through the interface.