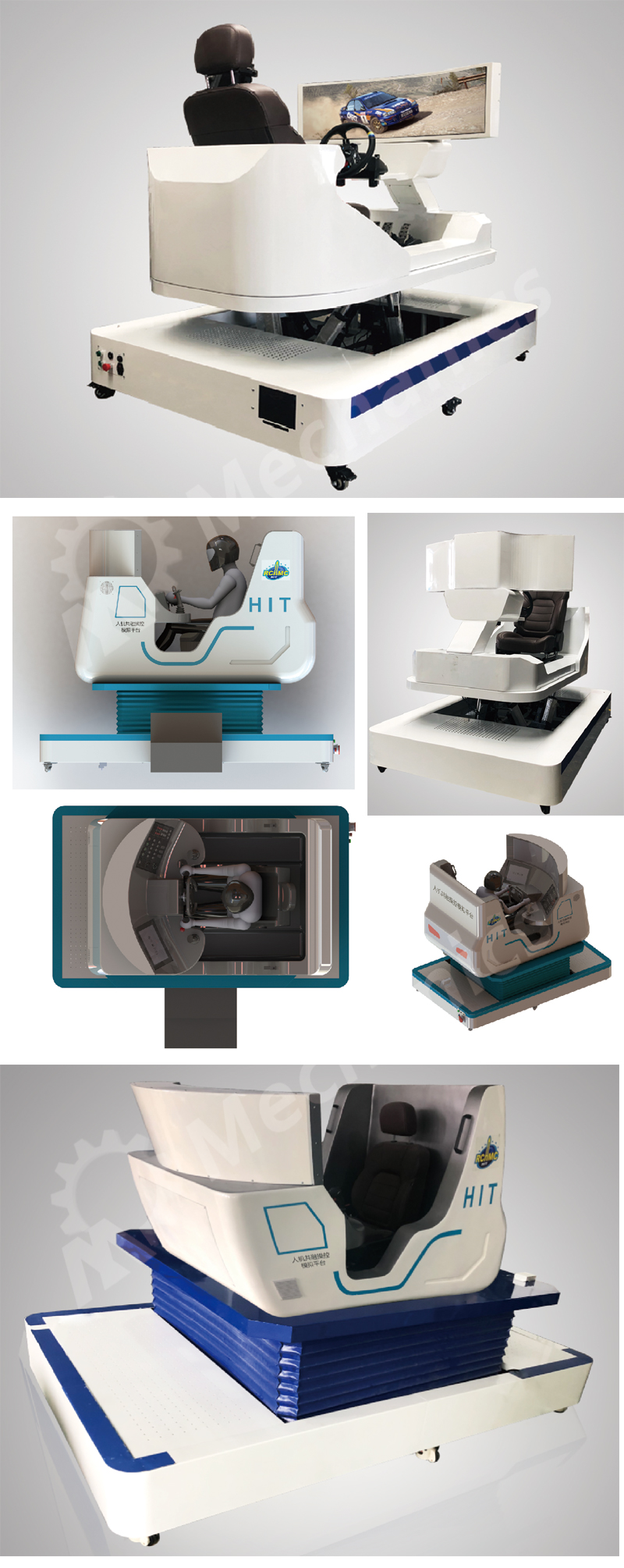
In order to improve the fidelity of the six-degree-of-freedom platform vehicle simulator to simulate real vehicle motion, a variable input washout algorithm was proposed in combination with the classic washout algorithm. According to the motion space of the simulator, the input signal of the classic washout algorithm is divided and transformed according to the amplitude. The high-amplitude input signal is scaled to prevent it from exceeding the platform motion space; the low-amplitude input signal is multiplied by a time-varying proportional coefficient, and the time-varying proportional coefficient is determined using a fuzzy adaptive algorithm, according to the movement of the human body on the motion simulator Sensation, the human body's motion sensation on the vehicle and the situation of the input signal, the input, output and fuzzy control rules of the fuzzy controller are selected. Taking the simulation of the longitudinal acceleration of the vehicle as an example, the simulation results show that the use of the variable input washout algorithm can not only limit the platform to the movement space of the platform, but also make full use of the movement ability of the platform, and improve the fidelity of the simulation of motion sensation .
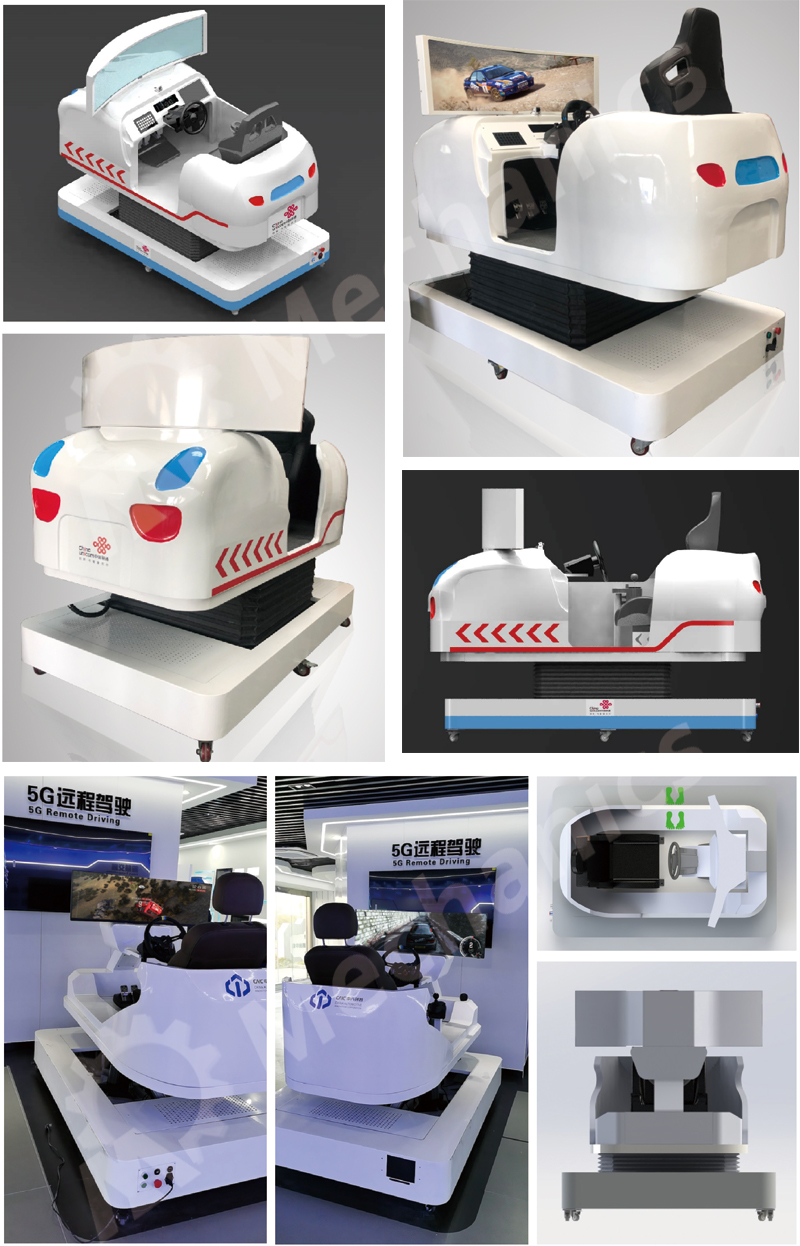
Self-driving cars will have to drive billions of miles to prove their reliability, which is impossible without the help of simulation. From the very beginning of autonomous driving research, simulators have played a key role in the development and testing of autonomous driving systems. Simulation enables developers to quickly test new algorithms without driving a real vehicle. Simulation has several important advantages over road testing: it is safer than real road testing, especially for certain hazardous scenarios (such as pedestrian jaywalking), and it can generate corner case (such as extreme weather). Additionally, the simulator is able to accurately reproduce all factors of the problem scenario, allowing developers to debug and test new patches.